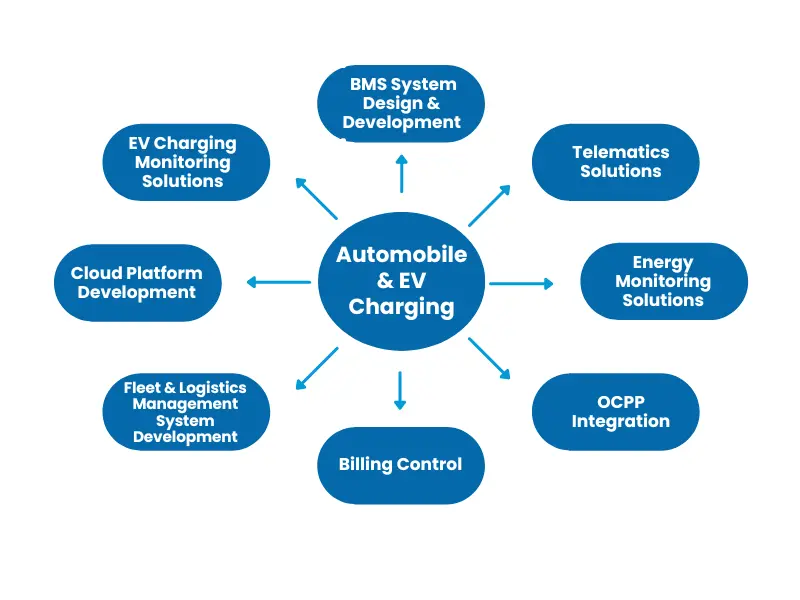
Our Expertise in Automotive and EV charging
CoreFragment Technologies delivers a complete EV charging technology system customized for OEMs and charging infrastructure providers. Our cloud platform integrates all charging stations, offering smart ev charging network management and hassle-free connectivity for efficient operations.
In addition to network integration, CoreFragment provides energy usage analytics, billing records, OCPP integration, and BMS design and development. This comprehensive solution allows clients to optimize their charging infrastructure, streamline processes, and improve the user experience.
With a modular and scalable approach, CoreFragment Technologies offers a smart EV charging infrastructure system that evolves with changing needs, promoting the adoption of sustainable mobility solutions and supporting future growth in the electric vehicle and sustainable transportation sector.